
2018年的10月,NXP发布了基于Arm Cortex M33内核的双核单片机LPC5500系列,首先量产的是型号为LPC55S69的处理器。本人很荣幸获NXP邀请体验LPC55S69的开发板,并基于此开发板移植了MPU9250 九轴传感器的实例,该实例在LPC5500正式发布期间,作为案例分享给了所有NXP单片机的粉丝。在今年这个盛夏,喜闻NXP新一届的双核大赛正在筹备中,而且本次使用的开发板应该就是LPC5500系列的处理器,希望NXP粉丝一起研究学习LPC5500这个MCU界的小钢炮!
本项目采用恩智浦全新一代LPC系列MCU产品LPC55S69,姿态传感器为MPU9250,应用IAR 8.32编译工具。LPC55S69通过I2C总线读取MPU9250的3个方向加速度数据,经过计算转化成俯仰角、翻滚角和偏航角,显示在OLED上。
硬件框图如下:


软件流程图如下:
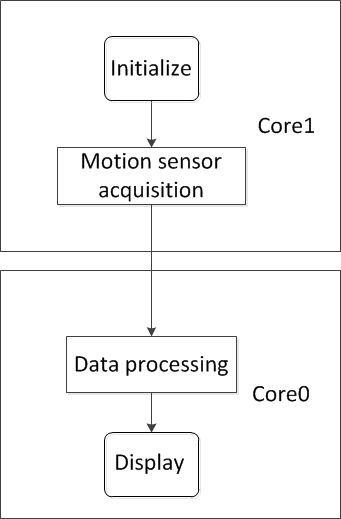

整个演示项目非常简单,应用的是MPU9250中的加速度计,项目可扩展性性很强,可以进一步用作地磁计和陀螺仪,应用于无人机、自动驾驶等领域。
最后做一下实物演示:
.jpg)

最底层是恩智浦提供的LPC55S69开发板,中间是自制的Anduino接口的开发板,上面连接MPU9250模块与OLED模块,这个左边器件是蓝牙模块(演示项目未用到这个模块)。可以看到通过转动电路板,显示器上的俯仰角、翻滚角和偏航角同步发生变化,三者的范围是约为±90°,由于加速度传感器较易收环境影响,实际应用中,在软件层面加上卡尔曼滤波等滤波算法,进一步得到更准确的数据。
源码和演示视频放在百度网盘上:
链接:https://pan.baidu.com/s/1QD-IYHJAhKf9oSOG8r0KNg
提取码:b48i
